Multiple Robots, One Bin, No Conflicts.
Bin picking gets hard when multiple robots reach into the same space at the same time. EvaLib lets multiple robots pick collaboratively from a shared workspace, coordinating their movements in real time so they never interfere with each other. The result is faster cycle times and a compact setup that gets more done in less space.

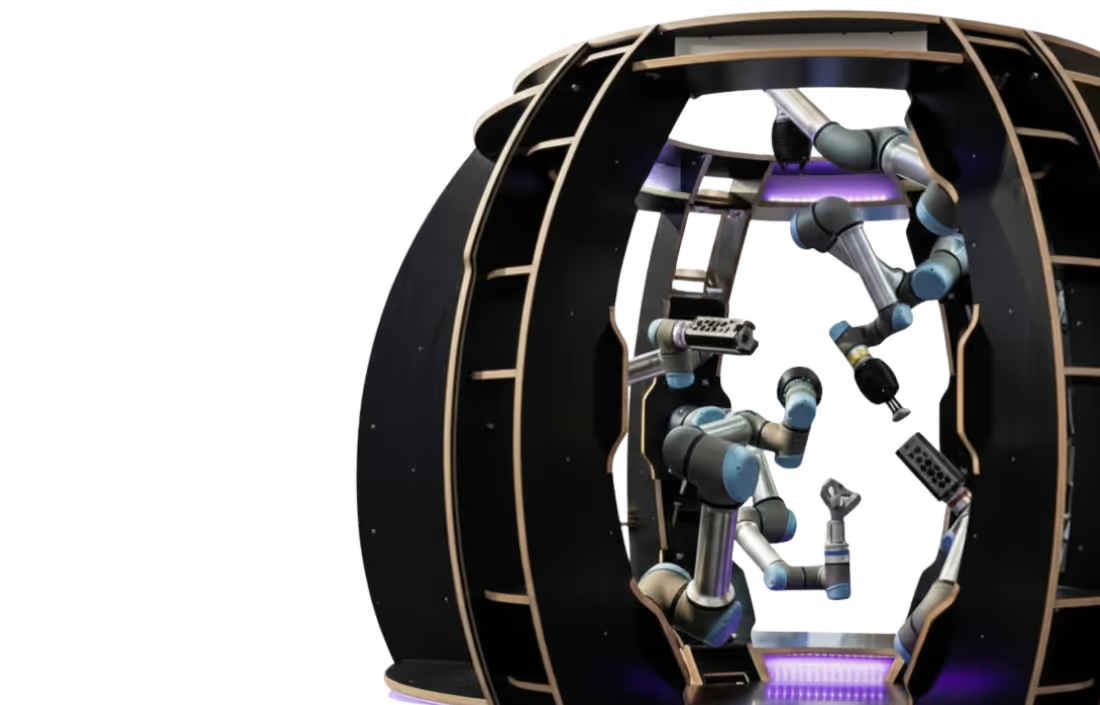
Collaborative bin picking with multiple robots in a shared workspace.
Coordinated picking avoids interference and keeps robots working at peak throughput.
Multiple robots share one bin in a compact cell, delivering more output per square meter.
Motions are recalculated in real time as the scene changes, maintaining process-safe operation.