Evalib: The High‑Performance Multi‑Robot Motion Library
EvaLib is a motion planning library for multi‑robot coordination in shared spaces. It uses constraint‑based programming instead of fixed paths: developers set goals, and EvaLib computes collision‑free, time‑optimized trajectories in real time. Robots adapt automatically to changing conditions. The library supports various kinematics and connects easily through OPC UA or custom interfaces, bridging digital control and physical robotics.

Floor space usage scales poorly
Unflexible fixtures & cell design
Time intensive programming
Complex calibration routine

Increased robot density

Dynamic reconfiguration, no fixtures

Outcome driven programming

Automatic multi-robot calibration
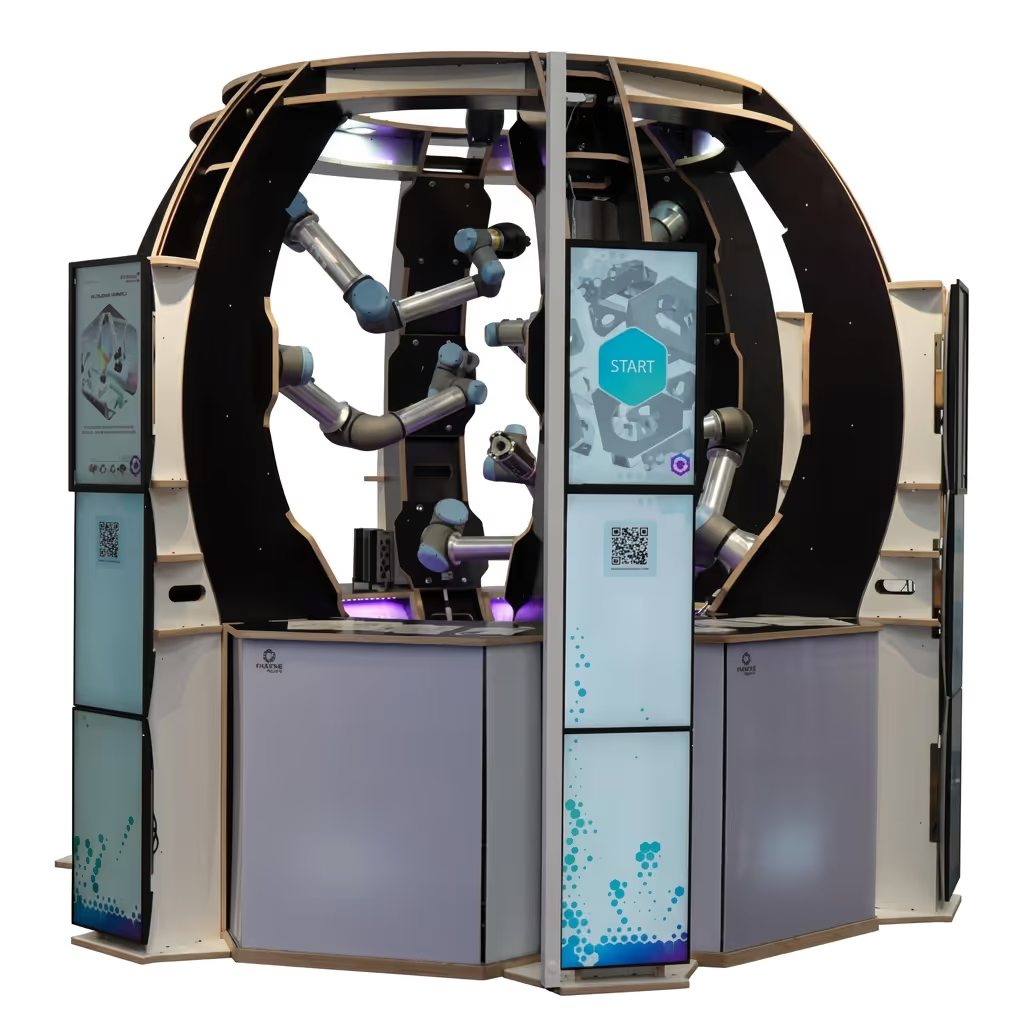

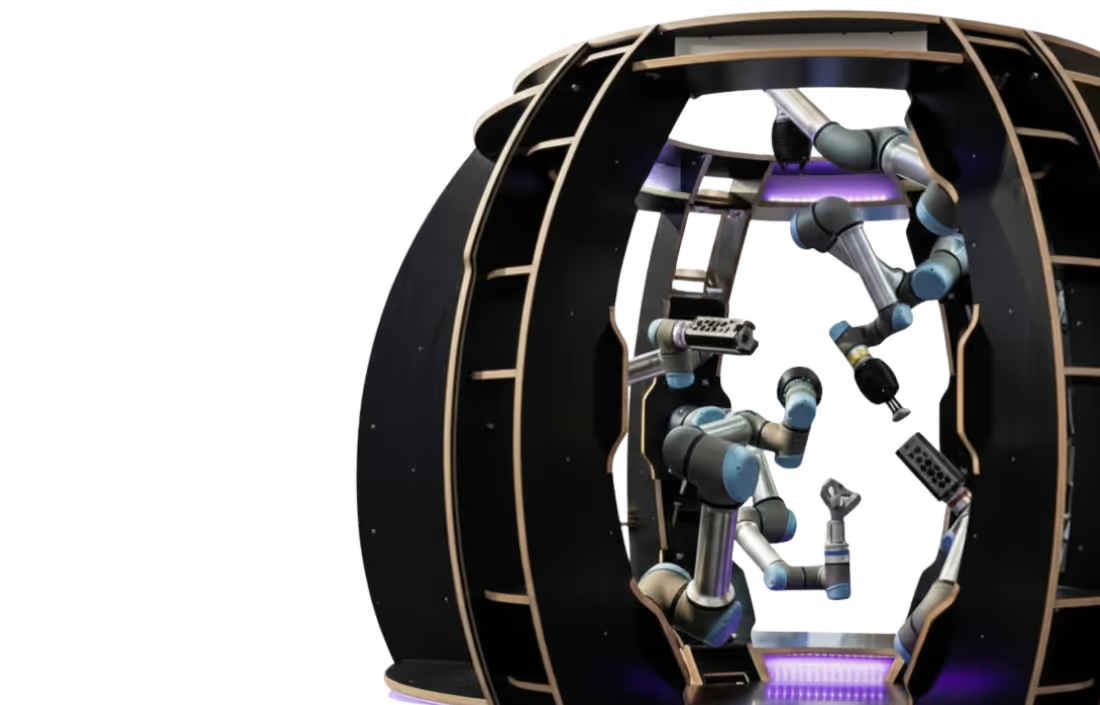
RoboSphere enables real-time multi-robot coordination in tight spaces, featuring collision-free path planning and flexible cell reconfiguration, reducing space and programming efforts.

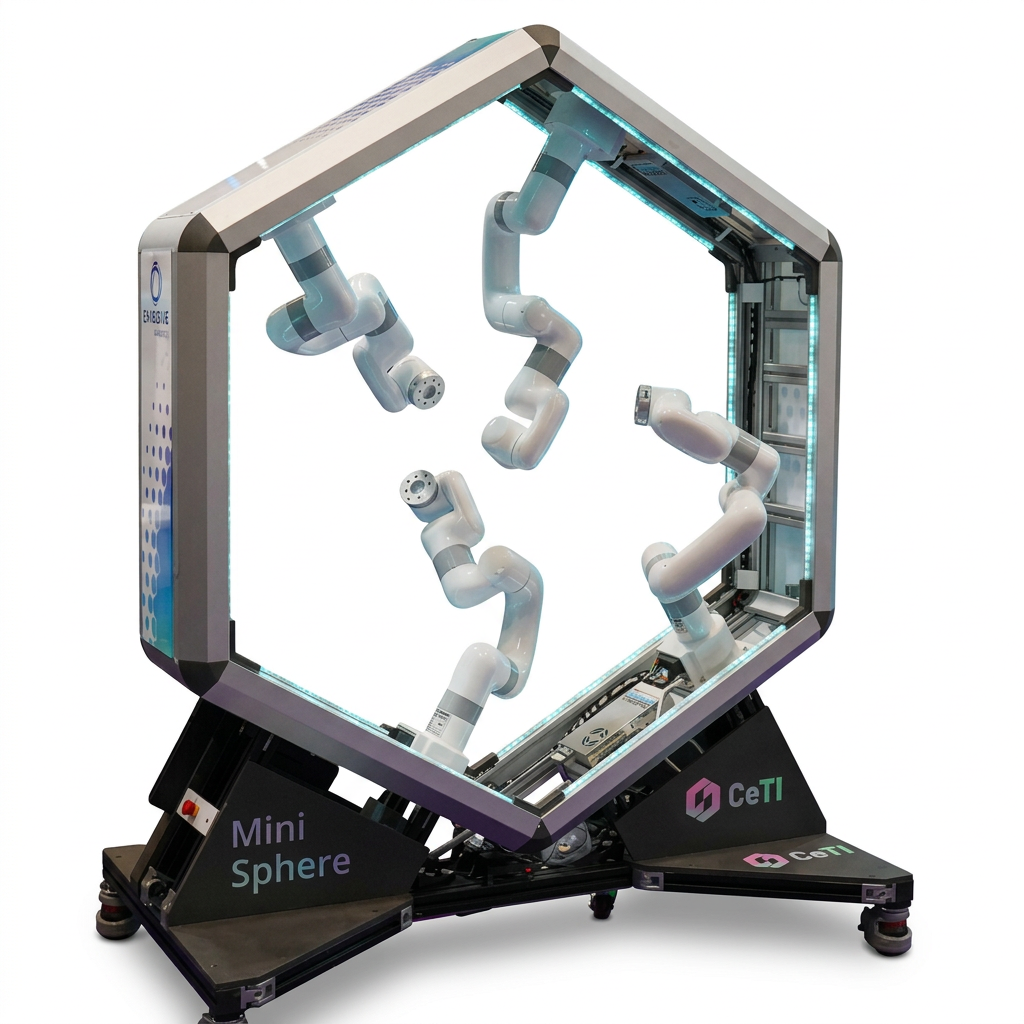
Our MiniSphere demonstrates our multi-robot technology in a compact, portable format, perfect for trade shows or smaller events.
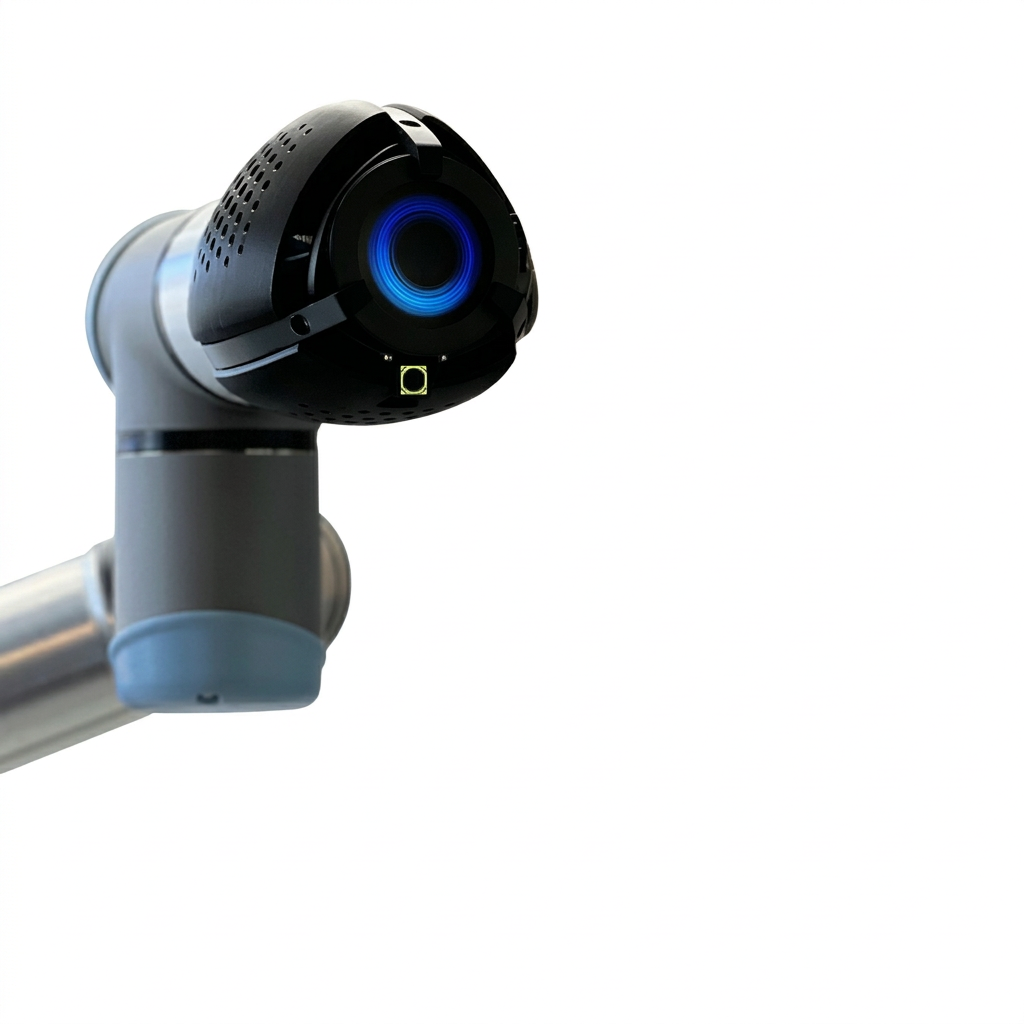
Our EVA Head demonstrator showcases our multi-robot technology with real-time responsiveness to humans and the environment, featuring collision-free movements.